
The code used for both parts of this project can be found here
Applying the Q-Learning Algorithm to a custom environment
In the previous article, we built the standard Q-learning algorithm from scratch and implemented it as a
class, Q. In this article we will construct a simple environment and attempt to solve it
using the Q class.
The Environment
A device shoots a projectile from the ground toward a target that is also at ground level. The shooter is initialized with a default initial velocity (we'll set this to 15m/s but you can change it if you want). Assuming acceleration due to gravity (g) is 9.8m/s², given a discrete target distance, determine the nearest available angle (in degrees) the projectile should be jetted at.
Note: We also supply the target range. The standard q-learning algorithm is commonly applied to discrete state and action spaces so it is more intuitive to provide whole number target values (and thus whole number states)
Also, in this environment, there are nine angles available: 5°, 10°, 15°, 20°, 25°, 30°, 35°, 40° and 45°
How might we solve this task?
Designing the state and action space
The environment itself will be implemented as a subclass of Env provided by the openai gym
library. The gym library is a popular resource
used to write environments in code for agents to interact with. It provides popular environments for testing
algorithms and gives you the tools to create your custom environments.
The advantage of subclassing Env is that by only overriding only the necessary methods, we can
still solve our custom environment using baseline algorithms from other libraries designed with the
gym.Env class in mind.
The State space
This is a simple environment. The states will simply be discrete values representing the target distances.
Thus, I use the Box data structure provided in the gym.spaces sublibrary.
Box is essentially an array that allows you to specify the lower and upper bounds for each
dimension, as well as the shape and data type of the array. To understand this data structure better,
consult the documentation. The documentation is
also a good starting point to get familiar with other spaces provided in the gym universe.
The state space is defined in the __init__ method below. Look for the line:
self.observation_space = Box(low=target_low, high=target_high, shape=(1,), dtype=np.int32)
The __init__ method, a dunder (or magic
method, as special methods like it are called in Python), is a special method that is called when an object
of a class is instantiated. By passing the values target_low and target_high as
instantiation parameters to the environment object, you set the bounds of the state space. By default, the
default values are 3 and 22, meaning the target values to learn the angles for range from 3m to 22m.
The Action space
Similarly, the action space will be discrete, representing the angles to choose from. The action space will
be represented by the Discrete data structure, which is simply a finite array that begins at 0
and ends at the provided argument for `n`. There are a couple differences between Discrete and
Box such as that Discrete strictly contains integer values, is of dimension 1 and
starts at 0. Box on the other hand can handle multiple data types, can be multidimensional and
allows you to set different bound values for each dimension.
Note: I used the Box data structure for the state space because I wanted it to be
possible to have a non-zero lower target range i.e the user can determine that the lower target range is
100m.
The documentation for Discrete can be found here
__init__ method:
self.action_space = Discrete(9)
self.action_to_angle = {
0:5,
1:10,
2:15,
3:20,
4:25,
5:30,
6:35,
7:40,
8:45
}
The attribute action_to_angle will serve as a lookup for converting supplied action values to angles.
The reward scheme
Since Q-learning is a value-based algorithm and obtains its policy indirectly using an action-value table, we need to come up with a scheme to encourage choosing the right angle.
There are maybe better ways to do this, but I decided to go with this scheme:
- Calculate error as the absolute distance between the target distance and the range covered by the projectile
- Create a dictionary to store the lowest errors attained at each supplied target value
- If the angle supplied during a timestep results in reducing the minimum error achieved for that
target/state, the reward for that timestep is
+1. If the error is greater, the reward is-1. If there is no change in the minimum error for that target value, the reward is simple,0.😐
This way, the policy indirectly trained will be to either reduce the error, or supply the angle that achieved the lowest error.
Having explained the design of this environment, let's get into the code.
Importing libraries
from gym import Env import numpy as np from gym.spaces import Discrete, Box import matplotlib.pyplot as plt %matplotlib inline import random
Initialization
Much of the initialization code has been explained above.
In addition, an attribute max_repeat is created. max_repeat represents the maximum
number of times a target value will be repeated when step is called. If max_repeat
is set to 4 and the current target is 5m, you will need to call the step method 4 times to move
on to the next target value. This allows us perform more Q-Table updates for each target during an episode.
A dictionary min_error is created to store the minimum absolute errors attained for each target.
Also, a dict target_to_state is created which will be used to convert the target distance to a
state value, for the Q-Table.
def __init__(self, initial_velocity=15, g=9.8, target_low=3, target_high=22, max_repeat=9): self.name = 'Projectile' # define environment bounds self.observation_space = Box(low=target_low, high=target_high, shape=(1,), dtype=np.int32) # there are 9 actions corresponding to the interval of angles from 5 to 45 self.action_space = Discrete(9) # store these for easy access later self.n_actions = self.action_space.n self.n_states = target_high - target_low + 1 self.v = initial_velocity # the default value for initial_velocity is 15m/s self.g = g # the default value for acceleration due to gravity is 9.8m/s² # the number of times to repeat a target value before moving on to the next self.max_repeat = max_repeat # for action-to-angle conversion self.action_to_angle = { 0:5, 1:10, 2:15, 3:20, 4:25, 5:30, 6:35, 7:40, 8:45 } # create a lookup of discrete state values corresponding to target distances self.target_to_state = {i:x for x,i in enumerate((range(target_low, target_high+1)))} # keep track of the lowest error attained for each target self.min_error = {x:np.inf for x in range(self.observation_space.low[0], self.observation_space.high[0] + 1)}
Reset
The reset() method is called to reset the state of an environment. Our reset()
method
- creates an attribute
target_listwhich is an array of all the target distances and shuffles the elements. It does this so we can keep track of the current episode's arrangement of target values. - selects an initial target and removes it from
target_list, using thenew_target()method - initializes the range of the projectile to 0, because we are yet to take an action
- initializes an attribute
current_countdownfor that target.current_countdownstarts at the value ofmax_repeatand is reduced at each time step by 1. When it eventually becomes 0, a new target will be supplied - sets the
doneattribute to False.donebecomes true when the episode is over - returns the current observation using
self.get_obs()and the current error calculated byself.get_info()
def new_target(self): # pick a target from the list of targets and remove it self.target = self.target_list.pop() def get_obs(self, verbose=False): # self.target = self.observation_space.sample() # generate random target self.state = self.target_to_state[self.target] # represent target as state # if verbose=True, return the true value of the target distance, else return # its representation as a state value if verbose: return f'Target distance: {self.target}m' else: return self.state def get_info(self, verbose=True): # return the number of meters by which we've missed the target self.error = np.abs(self.target - self.range) # absolute error # if verbose=True, return a full sentence, else just return the value of the error if verbose: return f'Error: {self.error:.2f}m' else: return self.error def reset(self, verbose=True): # store the set of targets we can select from self.target_list = list(range(self.observation_space.low[0], self.observation_space.high[0] + 1)) random.shuffle(self.target_list) # shuffle the available targets self.new_target() # generate a target value self.range = 0 # the projectile is yet to be shot, so range is still 0 self.current_countdown = self.repeat_count # start the countdown for the current target self.done = False return self.get_obs(verbose), self.get_info()
Calculating the Range
The range (also known as horizontal distance) of the projectile is calculated using the standard formula for
a projectile's range, assuming no air resistance and that the final height of the projectile is equal to its
initial height:
 The angle, θ, is converted to radians from degrees.
The angle, θ, is converted to radians from degrees.
def calc_range(self):
# calculate the range of the projectile using the relation v²·sin(2θ)/g
rad = np.pi/180 * angle
range = (v**2) * np.sin(2 * rad) / g
return range
Step
Calling step decrements current_countdown by 1. It takes an action value and
calculates the range by calling calc_range(). The error is computed using
get_info().
The reward is calculated using the scheme above. If the current_countdown is 0, a new target
value is generated using new_target and current_countdown is reinitialized to the
value of max_repeat. Once we run out of target values, done is set to
True, ending the episode.
def step(self, action):
# print(target_list)
# reduce the target repeat countdown by 1
current_countdown -= 1
# map the action to the angle of projectile
angle = action_to_angle[action]
# this is the range covered by the projectile at the given angle, save it in the
# lookup table for current ranges
range = calc_range()
# evaluate error for this round
error = get_info(verbose=False)
# if the error in this round is less than the history of errors for this round, the
# reward is set to +1. If it is higher, -1. Else, the reward is 0
if error < min_error[target]:
reward = 1
min_error[target] = error # update error range value
elif error > min_error[target]:
reward = -1
elif error == min_error[target]:
reward = 0
if current_countdown == 0:
if len(target_list) == 0:
# set done to True when there are no values left in target_list and end episode
done = True
else:
# else supply a new target and start the repeat counter again
new_target()
current_countdown = max_repeat
return get_obs(), reward, done, get_info()
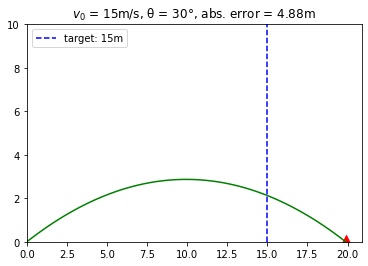
Rendering
render() contains the logic to visualize the target, range and error, using the numpy
library to calculate displacement values and matplotlib library for visualization.
def render(target, angle):
v, g = 15, 9.8 # initialize velocity and acceleration due to gravity
rad = np.pi/180 * angle
plt.figure()
params = {'mathtext.default': 'regular' } # mathtext, for subscripting 0 in v0 in plot title
tmax = (2 * v) * np.sin(rad) / g # calculate time of flight
t = tmax*np.linspace(0,1,100) # divide time of flight into 100 uniform time steps
x = ((v * t) * np.cos(rad)) # horizontal distance at each time step
y = ((v * t) * np.sin(rad)) - ((0.5 * g) * (t ** 2)) # vertical distance
plt.plot(x, y, color='g') # plot path
# draw line to target target (i.e desired distance) saved in `target`
plt.axvline(x = target, ls='--', color = 'b', label = f'target: {target}m')
# draw projectile at final coordinates
plt.scatter(x[-1], y[-1], color='r', markerinitial_velocity="^", s=200)
plt.ylim([0,10])
plt.xlim(left=0)
plt.title(f'$v_{0}$ = {v}m/s, θ = {angle}°, abs. error = {np.abs(x[-1]-target):.2f}m')
plt.legend()
render(target=15, angle=30)
Putting it all together in a class: Projectile
class Projectile(Env):
def __init__(self, initial_velocity=15, g=9.8, target_low=3, target_high=22, max_repeat=9):
self.name = 'Projectile'
# define environment bounds
self.observation_space = Box(low=target_low, high=target_high, shape=(1,), dtype=np.int32)
# there are 9 actions corresponding to the interval of angles from 5 to 45
self.action_space = Discrete(9)
# store these for easy access later
self.n_actions = self.action_space.n
self.n_states = target_high - target_low + 1
self.v = initial_velocity # the default value for initial_velocity is 15m/s
self.g = g # the default value for acceleration due to gravity is 9.8m/s²
# the number of times to repeat a target value before moving on to the next
self.max_repeat = max_repeat
# lookup the angle values for each action
self.action_to_angle = {
0:5,
1:10,
2:15,
3:20,
4:25,
5:30,
6:35,
7:40,
8:45
}
# create a lookup of discrete state values corresponding to target distances
self.target_to_state = {i:x for x,i in enumerate((range(target_low, target_high+1)))}
# keep track of the lowest error attained for each target
self.min_error = {x:np.inf for x in range(self.observation_space.low[0], self.observation_space.high[0] + 1)}
def new_target(self):
# pick a target from the list of targets and remove it
self.target = self.target_list.pop()
def get_obs(self, verbose=False):
# self.target = self.observation_space.sample() # generate random target
self.state = self.target_to_state[self.target] # represent target as state
# if verbose=True, return the true value of the target distance, else return
# its representation as a state value
if verbose:
return f'Target distance: {self.target}m'
else:
return self.state
def get_info(self, verbose=True):
# return the number of meters by which we've missed the target
self.error = np.abs(self.target - self.range) # absolute error
# if verbose=True, return a full sentence, else just return the value of the error
if verbose:
return f'Error: {self.error:.2f}m'
else:
return self.error
def reset(self, verbose=True):
# store the set of targets we can select from
self.target_list = list(range(self.observation_space.low[0], self.observation_space.high[0] + 1))
random.shuffle(self.target_list) # shuffle the available targets
self.new_target() # generate a target value
self.range = 0 # the projectile is yet to be shot, so range is still 0
self.current_countdown = self.max_repeat # start the countdown for the current target
self.done = False
return self.get_obs(verbose), self.get_info()
def calc_range(self):
# calculate the range of the projectile using the relation v²·sin(2θ)/g
rad = np.pi/180 * self.angle
range = (self.v**2) * np.sin(2 * rad) / self.g
return range
def step(self, action):
# print(self.target_list)
# reduce the target repeat countdown by 1
self.current_countdown -= 1
# map the action to the angle of projectile
self.angle = self.action_to_angle[action]
# this is the range covered by the projectile at the given angle, save it in the
# lookup table for current ranges
self.range = self.calc_range()
# evaluate error for this round
self.error = self.get_info(verbose=False)
# if the error in this round is less than the history of errors for this round, the
# reward is set to +1. If it is higher, -1. Else, the reward is 0
if self.error < self.min_error[self.target]:
self.reward = 1
self.min_error[self.target] = self.error # update error range value
elif self.error > self.min_error[self.target]:
self.reward = -1
elif self.error == self.min_error[self.target]:
self.reward = 0
if self.current_countdown == 0:
if len(self.target_list) == 0:
# set self.done to True when there are no values left in self.target_list and end episode
self.done = True
else:
# else supply a new target and start the repeat counter again
self.new_target()
self.current_countdown = self.max_repeat
return self.get_obs(), self.reward, self.done, self.get_info()
def render(self):
rad = np.pi/180 * self.angle
plt.figure()
# plt.clf()
params = {'mathtext.default': 'regular' } # mathtext, for subscripting 0 in v0 in plot title
tmax = (2 * self.v) * np.sin(rad) / self.g # calculate time of flight
t = tmax*np.linspace(0,1,100) # divide time of flight into 100 uniform time steps
self.x = ((self.v * t) * np.cos(rad)) # horizontal distance at each time step
self.y = ((self.v * t) * np.sin(rad)) - ((0.5 * self.g) * (t ** 2)) # vertical distance
plt.plot(self.x, self.y, color='g') # plot path
# draw line to target target (i.e desired distance) saved in `self.target`
plt.axvline(x = self.target, ls='--', color = 'b', label = f'target: {self.target}m')
# draw projectile at final coordinates
plt.scatter(self.x[-1], self.y[-1], color='r', marker="^", s=200)
plt.ylim([0,10])
plt.xlim(left=0)
plt.title(f'$v_{0}$ = {self.v}m/s, θ = {self.angle}°, abs. error = {np.abs(self.x[-1]-self.target):.2f}m')
plt.legend()
def __repr__(self):
return f'''Projectile environment:
Initial velocity: {self.v}m/s
Acceleration due to gravity: {self.g}m/s²
Available angles in degrees:{list(self.action_to_angle.values())}'''
Solving this environment using the Q class
Using the range formula provided earlier, we can expect our Q-learning algorithms to learn the closest
angles.
The table below contains actual values of the ranges covered at the provided angles
| angle(°) | Range(m/s) |
|---|---|
| 5° | 3.98682 |
| 10° | 7.8525 |
| 15° | 11.4796 |
| 20° | 14.7579 |
| 25° | 17.5878 |
| 30° | 19.8832 |
| 35° | 21.5746 |
| 40° | 22.6104 |
| 45° | 22.9592 |
Let's import the Q class defined in the previous article
from q_learning import Q
Let's train, applying the Q class to the Projectile environment
sim = Projectile() sim.reset() model = Q(sim, exploration_fraction=0.5) model.train() model.show(save_as='converged.png')
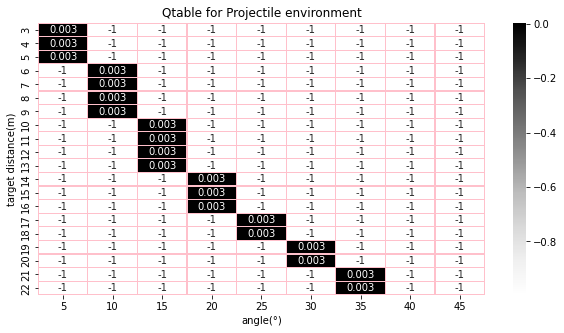
Great! Comparing the actions chosen by the algorithm after training to the correct values in the table above, we see we've been able to solve this toy problem using standard Q-Learning.